BIM-driven computational design for robotic manufacturing in off-site construction: an integrated approach from design to manufacturing (DtM)
Abstract
As the digitization of the architecture, engineering and construction (AEC) industry accelerates, digital technologies and their relationship with design and construction are reaching a new level of complexity. Data integration becomes the quest for ad hoc digital tools, and workflow automation gains momentum. These global developments are forcing the built environment to implement radical changes in the way construction projects are designed and produced. In this context, Building Information Modeling (BIM) has gained momentum in design practices thanks to its ability to frame construction workflows in a digital environment. On the other hand, interest in robotized manufacturing (RM) for industrialized production has grown considerably, thanks to the potential it offers for improving productivity. However, the joint use of BIM and MR in construction has not yet been sufficiently studied in the scientific literature. What’s more, each system is characterized by its own proprietary software and file formats, implying a lack of technological interoperability between the BIM-RM dyad.
This paper-based thesis studies the operationalization of robotics in construction. More specifically, she is studying the technological integration of BIM and RM tools to operationalize industrial robots in construction systems. The literature review first showed that such integration is possible thanks to digital design (CD) tools. It also showed that off-site construction (OSC) is an appropriate system
In the AEC industry, digital technologies have introduced a new data culture, often perceived as a radical disruption.
often perceived as radically disruptive. It has changed the way projects are designed, managed and built. In this
In this context, the present research is based on distinctive concepts that contribute to this
to this disturbance, namely BIM, CD and RM. This article integrates these approaches into a technological triad
and reflects their common potential in OSC systems. Consequently, this research gives rise to
the design-to-manufacture (DtM) approach.
The DtM approach improves on the DfM method by integrating robotic design and programming for manufacturing.
robotics for manufacturing. It provides an overview of RM-OSC technology interoperability and gives BIM-CD technology integration a central role in enabling this interoperability.
and gives BIM-CD technological integration a central role in the implementation of this dyad.
dyad. It also reveals that the systems concerned become technologically interoperable when combined.
combined. Consequently, this research goes beyond data integration and directs this need towards data management.
data management. It opens up new avenues of research, including but not limited to the remaining dimensions of interoperability (i.e. contextual, procedural, etc.).
the remaining dimensions of interoperability (i.e. contextual, procedural, organizational) of the systems studied, mass customization in information systems and information management systems.
It provides new avenues for research, including the remaining dimensions of interoperability (i.e. contextual, procedural, organizational) of the systems studied, mass customization in CSOs and AI services for construction robotics.
Project contributions
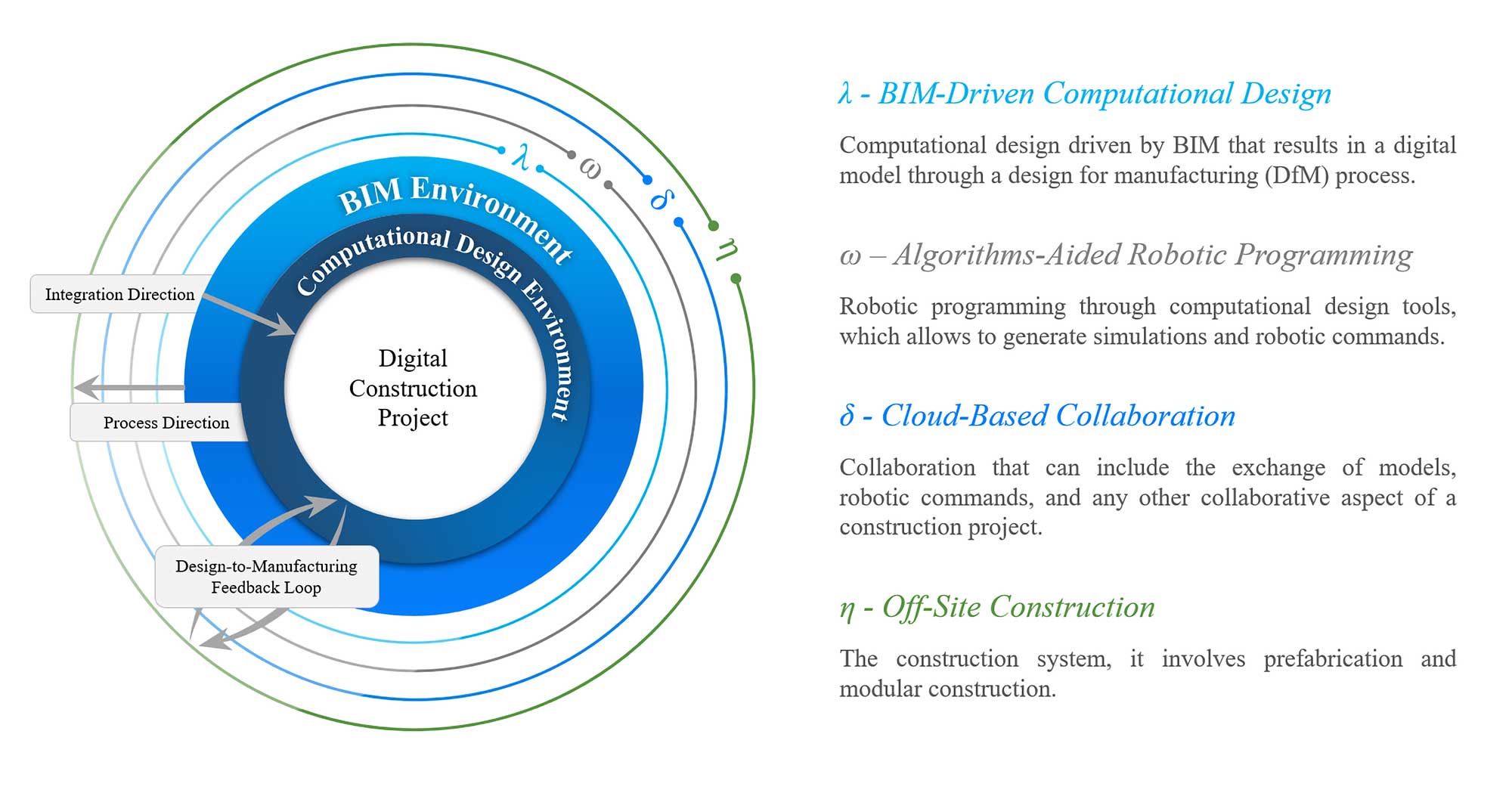
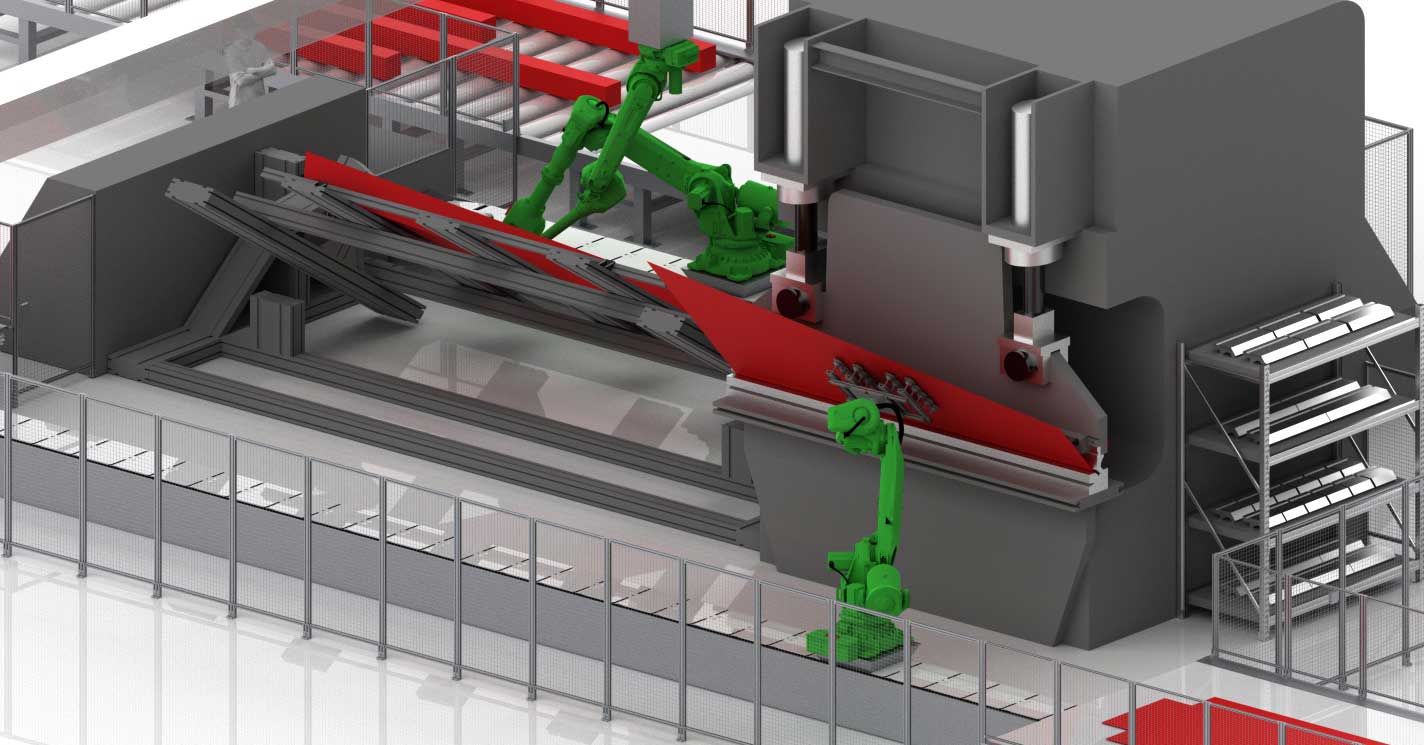
The study of technological interoperability between BIM, digital design (CD), robotic manufacturing (RM) and off-site construction (OSC) has highlighted a new form of dialogue between the design and manufacturing phases. In effect, the BIM model is the data source, and is taken over and converted by the CD tools into a program for a robotic arm, which in turn transforms this program into an operation for OSC. This data flow corresponds to BIM-driven computational design for robotic manufacturing in off-site construction, and leads to the Design-to-Manufacturing (DtM) approach.
In this research, the DtM approach is communicated through a framework (shown in the first gallery illustration) that relies on the integration of BIM and CD environments to enable algorithm-assisted robotic programming for OSC. Consequently, the DtM framework demonstrates: Cloud-based design, management and collaboration through the BIM-CD dyad; The integration of robotic design and programming through the CD-RM dyad; Its potential to operationalize risk management in OSC systems through the BIM-CD-RM triad. This research therefore defined the link between BIM and CD for the use of risk management in OSC systems, and demystified the challenges of technological interoperability in robotic construction. It also demonstrated the solution proposed by the DtM framework: these four systems become technologically integrated when combined.
Publications
Publications from this project are available below:
Cavka, Hasan Burak, Sheryl Staub-French, and Erik Poirier. “Levels of BIM compliance for model handover”. Journal of Information Technology in Construction 23 (2018): 243-58.
Awards
The student responsible for this project received the following awards:
{kind=link}
{kind=link}
{kind=link}
{kind=link}