Conception computationnelle pilotée par le BIM pour la fabrication robotique dans la construction hors site : une approche intégrée de la conception à la fabrication (DtM)
Abstract
Alors que la numérisation de l’industrie de l’architecture, de l’ingénierie et de la construction (AEC) s’accélère, les technologies numériques et leur relation avec la conception et la construction atteignent un nouveau niveau de complexité. L’intégration des données devient la quête d’outils numériques ad hoc, et l’automatisation des flux de travail prend de l’ampleur. Ces évolutions globales obligent l’environnement bâti à mettre en œuvre des changements radicaux dans la manière dont les projets de construction sont conçus et produits. Dans ce contexte, la modélisation des données du bâtiment (BIM) a pris de l’ampleur dans les pratiques de conception grâce à sa capacité à encadrer les flux de travail de construction dans un environnement numérique. D’autre part, l’intérêt pour la fabrication robotisée (RM) pour la production industrialisée a considérablement augmenté grâce aux possibilités qu’elle offre d’améliorer la productivité. Cependant, l’utilisation conjointe de la BIM et de la RM dans la construction n’a pas encore été suffisamment étudiée dans la littérature scientifique. De plus, chaque système est caractérisé par son logiciel et ses formats de fichiers propriétaires, ce qui implique un manque d’interopérabilité technologique entre la dyade BIM-RM.
La présente thèse basée sur un article étudie l’opérationnalisation de la robotique dans la construction. Plus précisément, elle étudie l’intégration technologique des outils BIM et RM afin d’opérationnaliser les robots industriels dans les systèmes de construction. L’analyse de la littérature a d’abord montré qu’une telle intégration est possible grâce aux outils de conception numérique (CD). Elle a également montré que la construction hors site (CSP) est un système approprié
Dans l’industrie AEC, les technologies numériques ont introduit une nouvelle culture des données, souvent perçue comme une perturbation radicale.
souvent perçue comme radicalement perturbatrice. Elle a modifié la façon dont les projets sont conçus, gérés et construits. Dans ce
Dans ce contexte, la présente recherche s’appuie sur des concepts distinctifs contribuant à cette
à cette perturbation, à savoir la BIM, la CD et la RM. Cet article intègre ces approches dans une triade technologique
technologique et reflète leur potentiel commun dans les systèmes OSC. Par conséquent, cette recherche donne lieu à
l’approche de la conception à la fabrication (DtM).
L’approche DtM améliore la méthode DfM en intégrant la conception et la programmation robotique pour la fabrication.
robotique pour la fabrication. Elle donne un aperçu de l’interopérabilité technologique RM-OSC et donne à l’intégration technologique BIM-CD un rôle central pour permettre cette interopérabilité.
et confère à l’intégration technologique BIM-CD un rôle central dans la mise en œuvre de cette dyade.
dyade. Elle révèle également que les systèmes concernés deviennent technologiquement interopérables lorsqu’ils sont combinés.
combinés. Par conséquent, cette recherche va au-delà de l’intégration des données et oriente ce besoin vers la gestion des données.
gestion des données. Elle ouvre de nouvelles voies de recherche, y compris, mais sans s’y limiter, les dimensions d’interopérabilité restantes (c’est-à-dire contextuelles, procédurales, etc.).
les dimensions restantes de l’interopérabilité (c’est-à-dire contextuelle, procédurale, organisationnelle) des systèmes étudiés, la personnalisation de masse dans les systèmes d’information et les systèmes de gestion de l’information.
Elle fournit de nouvelles pistes de recherche, notamment les dimensions restantes de l’interopérabilité (c’est-à-dire contextuelle, procédurale, organisationnelle) des systèmes étudiés, la personnalisation de masse dans les OSC et les services d’IA pour la robotique de construction.
Contributions du projet
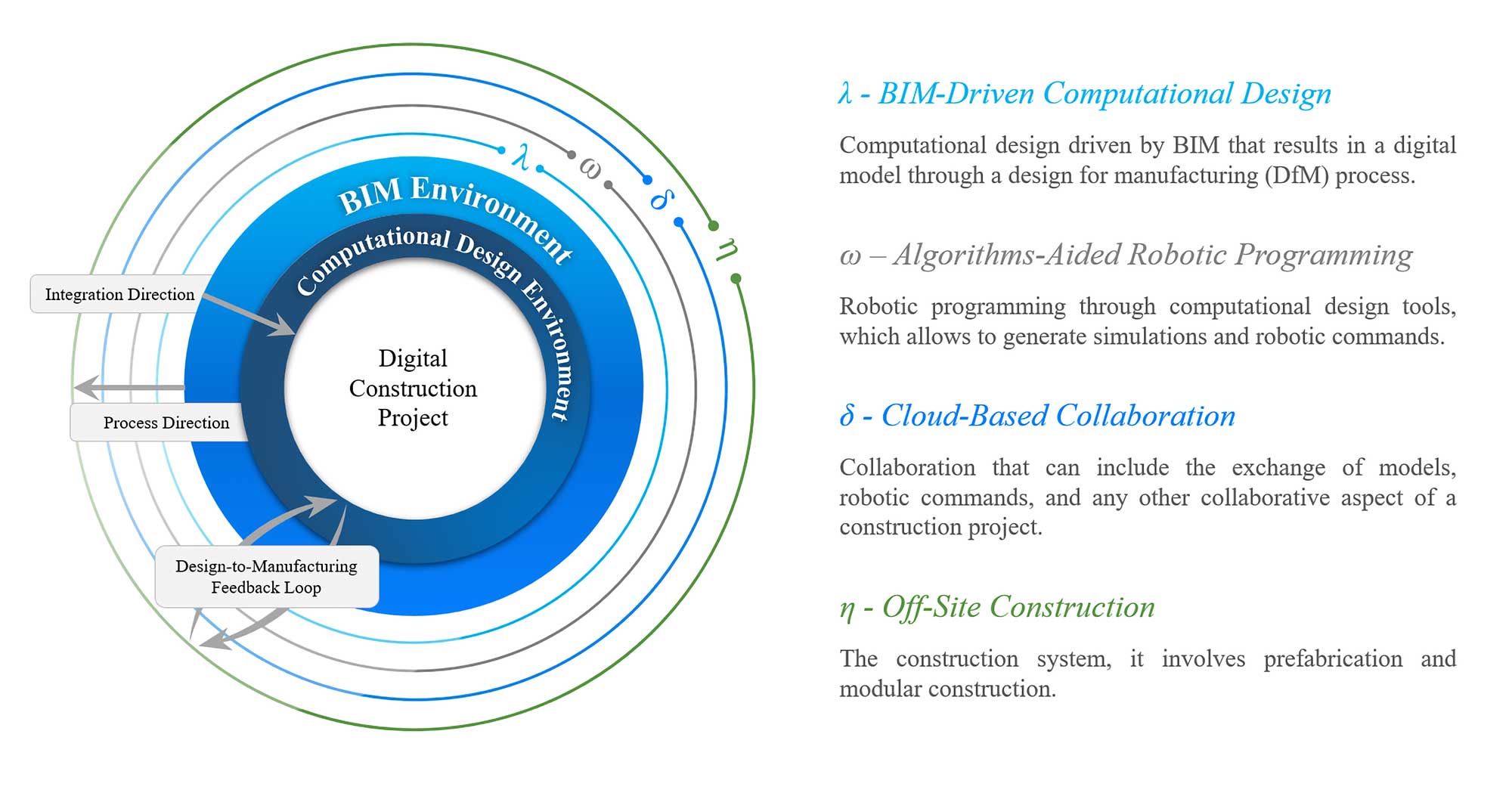
L’étude de l’interopérabilité technologique entre la BIM, la conception numérique (CD), la fabrication robotisée (RM) et la construction hors site (OSC) a permis de mettre en évidence une nouvelle forme de dialogue entre les phases de conception et de fabrication. En effet, le modèle BIM est la source de données, il est pris en charge et converti par les outils CD en un programme pour un bras robotique, qui à son tour transforme ce programme en une opération pour OSC. Ce flux de données correspond à la conception computationnelle pilotée par la BIM pour la fabrication robotique dans la construction hors site et conduit à l’approche de la conception à la fabrication (Design-to-Manufacturing – DtM).
Dans cette recherche, l’approche DtM est communiquée par le biais d’un cadre (présenté dans la première illustration de la galerie) qui repose sur l’intégration des environnements BIM et CD pour permettre une programmation robotique assistée par des algorithmes pour OSC. Par conséquent, le cadre DtM démontre : La conception, la gestion et la collaboration basée sur le cloud grâce à la dyade BIM-CD ; L’intégration de la conception et de la programmation robotique grâce à la dyade CD-RM ; Son potentiel pour opérationnaliser la gestion des risques dans les systèmes OSC grâce à la triade BIM-CD-RM. Cette recherche a donc défini le lien entre la BIM et la CD pour l’utilisation de la gestion des risques dans les systèmes OSC, et a démystifié les défis de l’interopérabilité technologique dans la construction robotisée. Elle a également démontré la solution proposée par le cadre DtM : Ces quatre systèmes deviennent technologiquement intégrés lorsqu’ils sont combinés.
Publications
Les publications de ce projet sont disponibles ci-dessous :
{kind=link}
{kind=link}
{kind=link}
{kind=link}