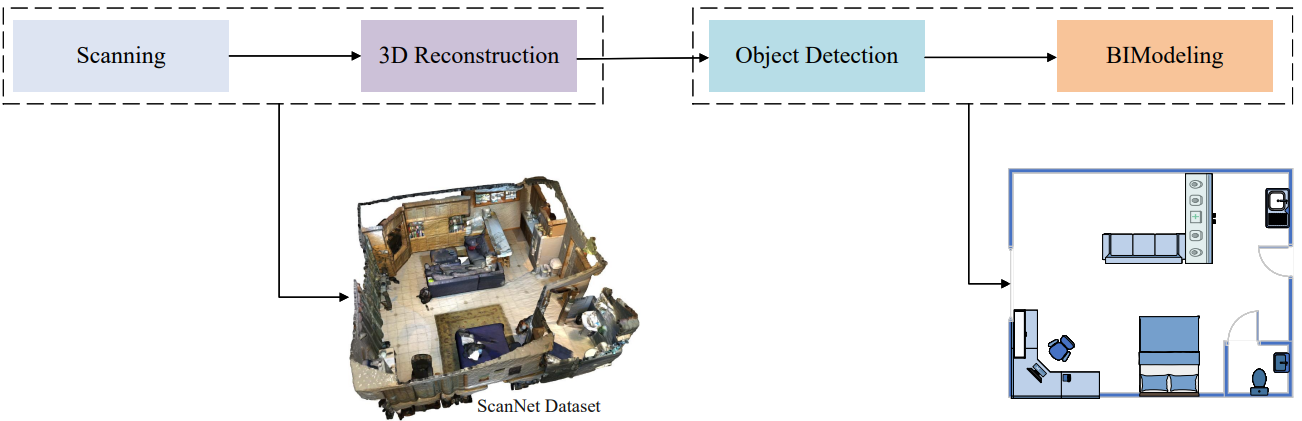
Avec la prévalence d’appareils équipés de technologies d’acquisition de données 3D (c’est-à-dire de capteurs de couleur et de profondeur), la compréhension de scènes 3D à partir de données scannées a été considérée comme un attrait significatif. En outre, les réseaux neuronaux profonds (RNP) ont montré des performances remarquables dans diverses applications 3D, telles que la construction de modèles d’information sur les bâtiments (BIM) à partir de données 3D numérisées (c’est-à-dire de la numérisation à la BIM). Cependant, plusieurs problèmes, tels que le manque de données étiquetées pour l’entraînement des DNN, la mauvaise extraction des descripteurs de caractéristiques pour la reconnaissance d’objets et les approches inefficaces pour la reconstruction paramétrique, remettent en question l’utilisation efficace des DNN pour la numérisation vers la BIM. Pour surmonter les problèmes susmentionnés, nous étudions dans cette recherche un cadre en deux étapes pour effectuer une reconstruction de scène basée sur la BIM à partir de données numérisées. En particulier, dans la première étape, nous étudions un détecteur d’objets semi-supervisé avec une colonne vertébrale d’extraction de caractéristiques de nuages de points (PC) tenant compte de la géométrie. Dans un deuxième temps, nous visons à développer une approche d’extraction d’objets Industry Foundation Class (IFC) pour faire correspondre l’objet détecté dans la scène scannée avec les objets paramétriques IFC pré-enregistrés. Le cadre proposé exploite les performances remarquables des DNN pour comprendre les scènes paramétriques à partir des données scannées et permet une reconstruction BIM « telle quelle » sans nécessiter les méthodes traditionnelles à forte intensité de main-d’œuvre.
1. Réaliser une analyse documentaire approfondie afin d’identifier les lacunes de la recherche et de rechercher des solutions plausibles. 2. Proposer une méthode efficace en termes de données et semi-supervisée pour atténuer le problème de l’entraînement de l’épine dorsale du détecteur d’objets de la SFI, basée sur le DNN, avec un nombre limité de données étiquetées.
3. Étudier les stratégies de pointe pour l’apprentissage de descripteurs de caractéristiques préservant l’échelle à partir de données numérisées pour une détection d’objets 3D plus robuste. 4. Proposition d’une méthode paramétrique de récupération d’objets pour une reconstruction de scène basée sur l’IFC de bout en bout. 5. Valider l’efficacité des méthodes proposées en effectuant une évaluation complète de leur performance par rapport aux rivaux de l’état de l’art.
Contributions du projet
La première contribution attendue de cette recherche sera de générer des pseudo-échantillons 3D fiables et de permettre à l’épine dorsale du détecteur d’objets 3D basée sur les DNN d’apprendre explicitement les descripteurs de caractéristiques à partir des pseudo-échantillons. En outre, une extraction robuste des caractéristiques joue un rôle essentiel dans la vitesse de convergence des DNN et, par conséquent, dans la robustesse de la détection des objets. La deuxième contribution attendue de cette recherche sera la réalisation d’une extraction de caractéristiques plus efficace avec des performances supérieures à celles des approches existantes pour la détection d’objets IFC. En ce qui concerne la reconstruction de la scène IFC en 3D, la troisième contribution sera l’introduction d’une approche de recherche d’objets IFC basée sur les DNN, qui non seulement surpasse les méthodes conventionnelles basées sur des règles en termes de précision et d’adaptabilité à divers environnements intérieurs à plusieurs étages, mais qui facilite également la procédure de reconstruction de la scène IFC.
{kind=link}